For engineers who are new to IBIS modeling, the “IBIS CookBook” [LINK HERE] is a very good reference document to get started. The latest version, V4.0, was created back in 2005. While most of the documented extraction procedures still hold true to this date, some of them may be tedious or even ambiguous in terms of executions. This is particular true for processes mentioned in Chapter 4, differential buffer modeling. Further more, most recent IBIS summit presentations focus on “new and hot” topics like IBIS-AMI modeling methodologies and not many are for the traditional IBIS. In this post, I would like to first review these “formal” process, dive into how each modeling table is extracted and used in simulation, then propose a “quick and easy” method particular for differential buffer. I will then summarize with and this approach’s pros and cons.
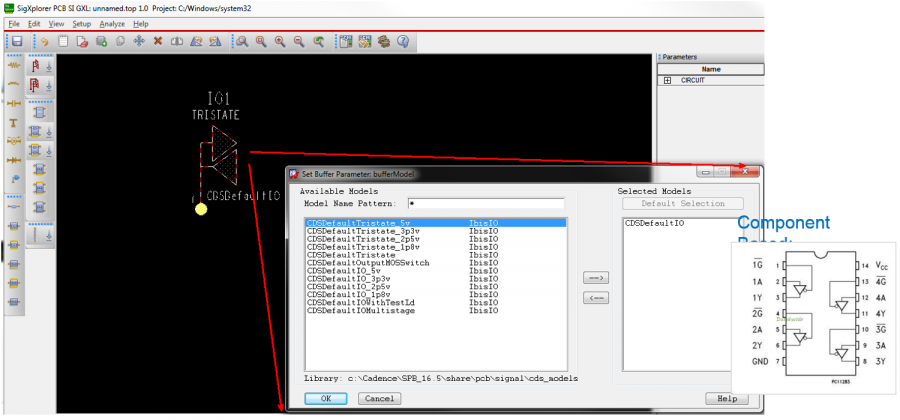
IBIS model components:
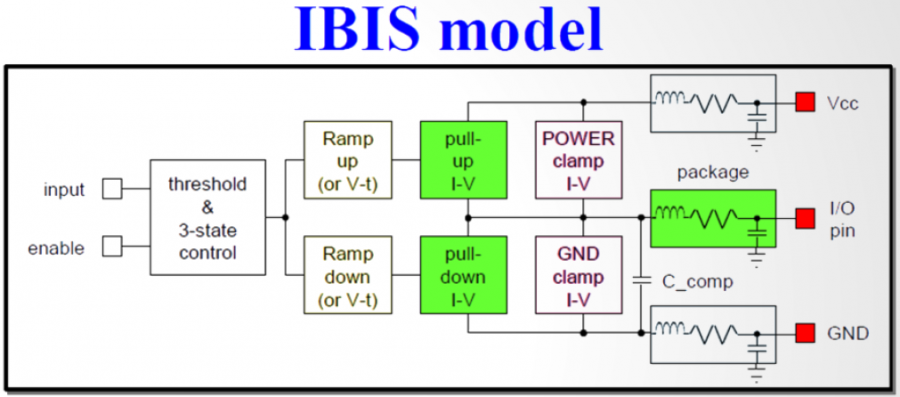
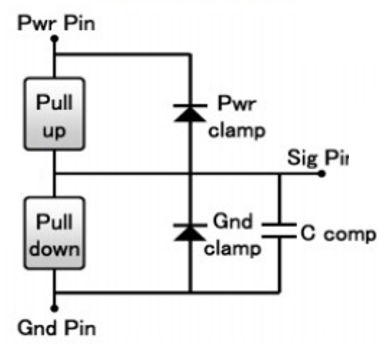
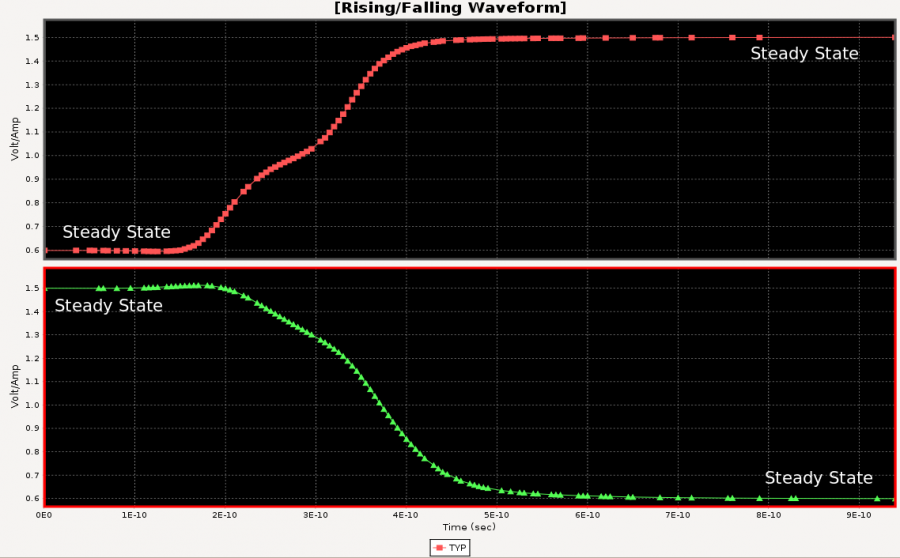
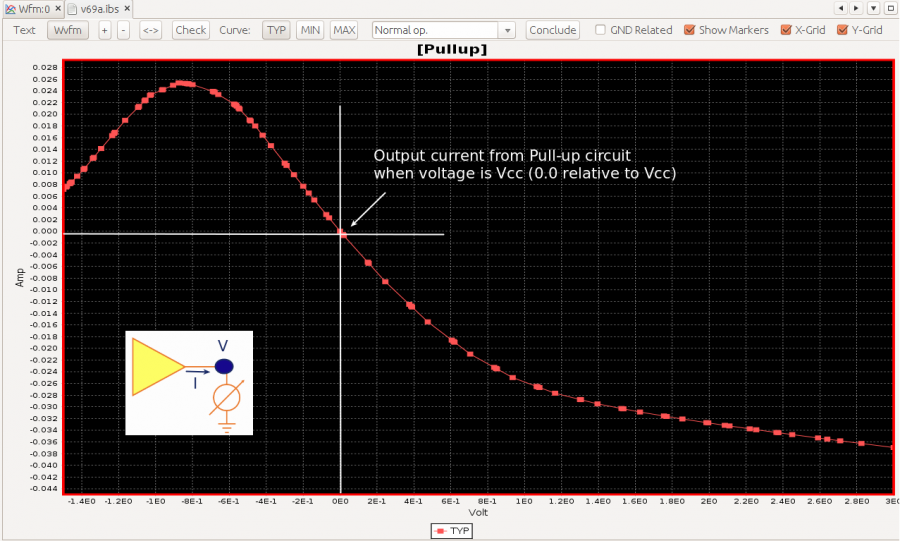
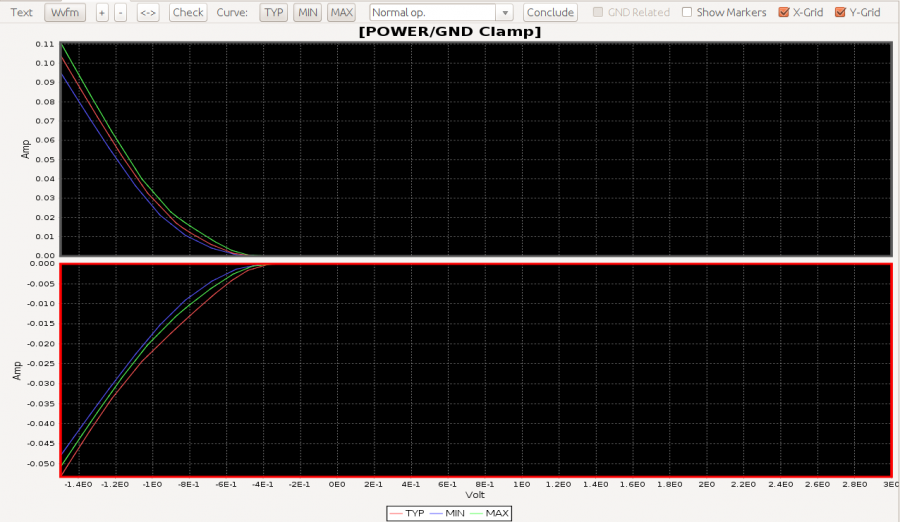
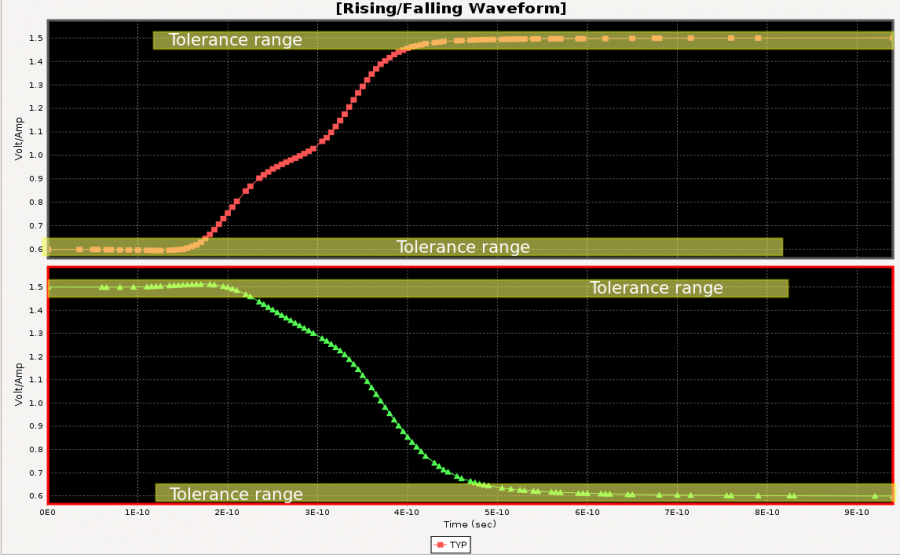
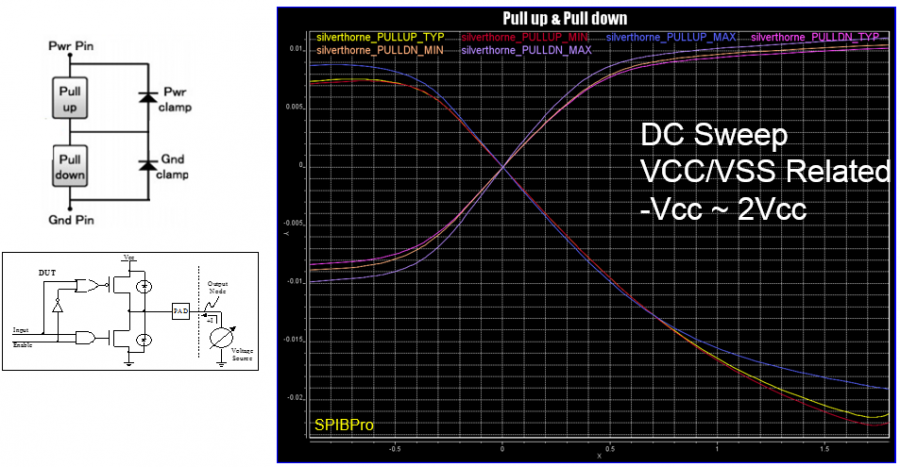
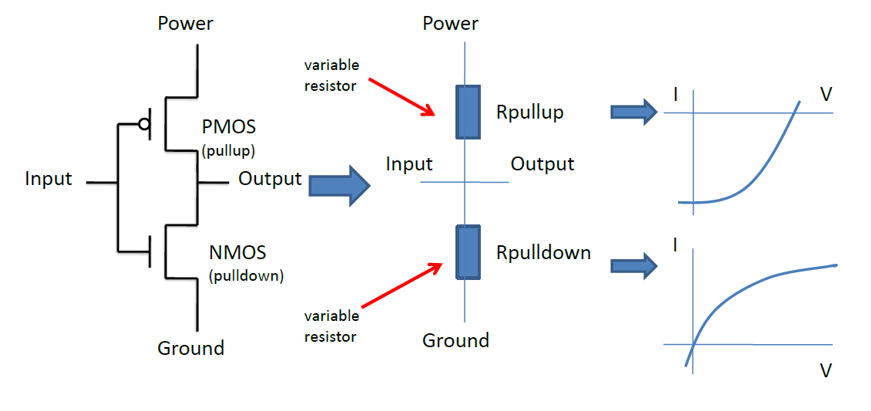
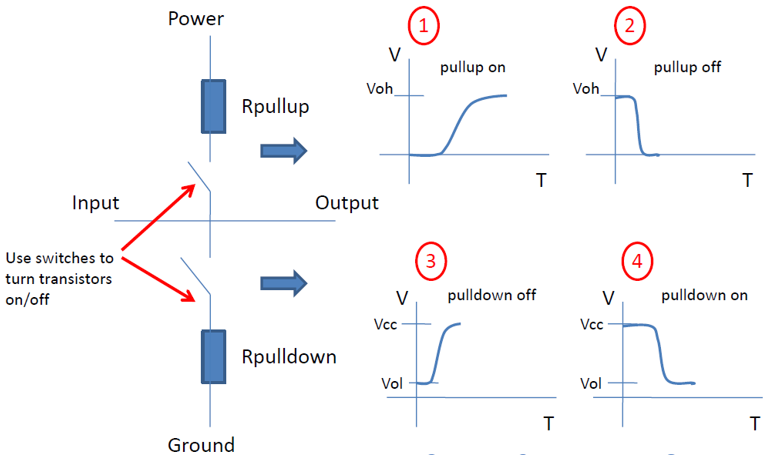
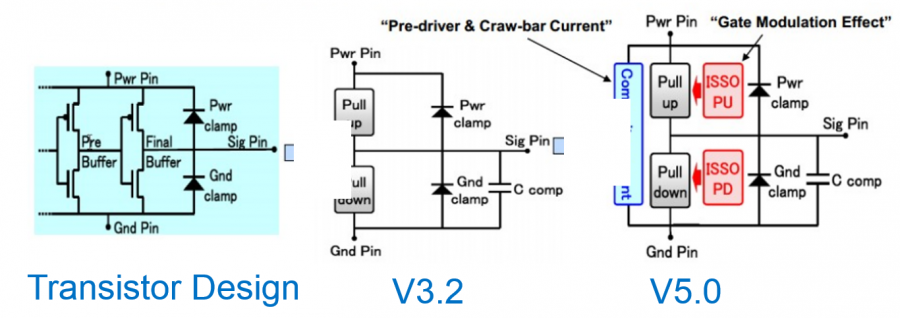
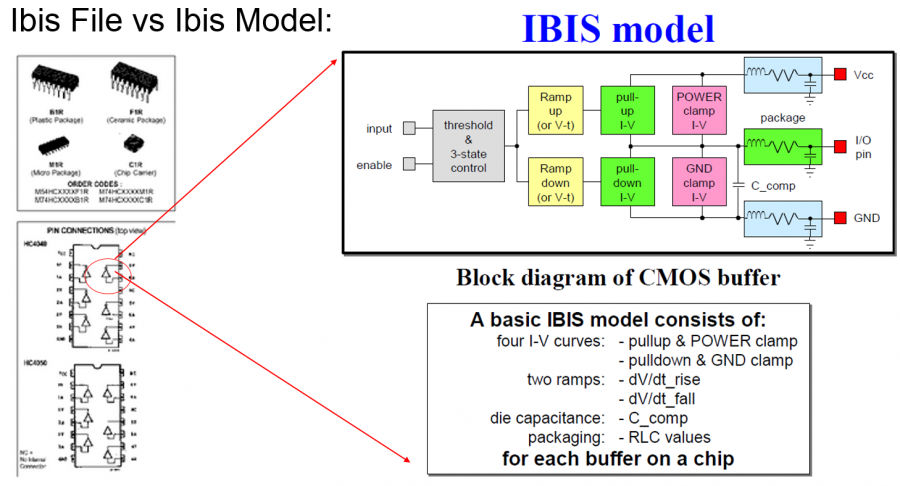
The most basic IBIS building block, as defined in Spec. Version 3.2, is shown above. Typically at least six tables will be included in an output type buffer. They are IV (Pull-up, Pull-down) and Vt( Rising and falling) under two different test load conditions. Additional clamp IV table (Power and Ground clamp) may be added for input type buffer. After Spec version V5.1, Six additional IT tables for ISSO_PU/PD/Composite currents have also been added to address PDN effects. To create an IBIS model, the data extraction processes start with exciting particular portion of the buffer so that measured data can be post-processed to formulate as a spec-compatible table format. Because a model also has TYP/MIN/MAX skews, so the number of simulations are basically the aforementioned number of tables times three. That is, for a most basic IBIS modeling, one may need to simulate at least eighteen cases (or simulation “decks”).
To explain a little bit more regarding blocks untouched by proposed new method, I list them in the bullets below:
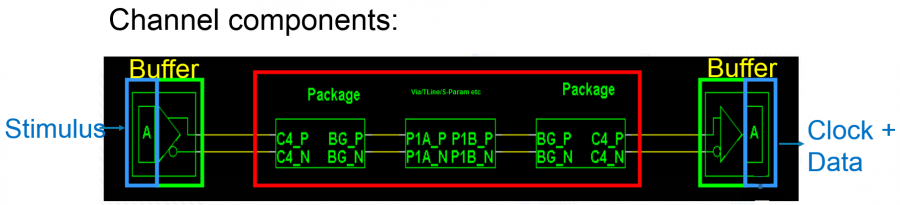
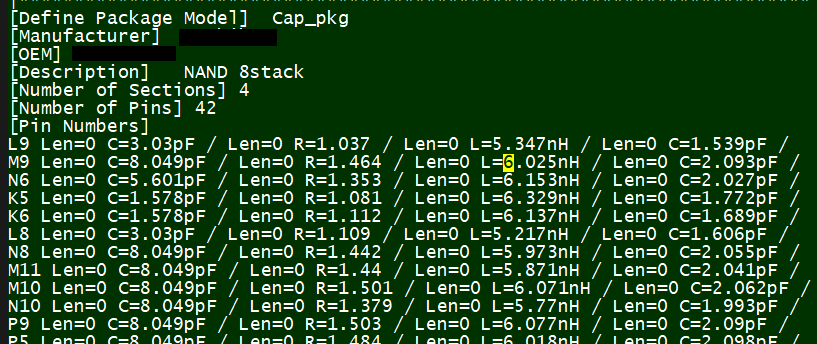
- Package/Pin parasitics: IBIS cookbook and normal modeling flow do not mention about this part. Usually a buffer package’s model is extracted using tools such as HFSS or Q3d into a form of S-parameters or equivalent broad-band spice model. An IBIS model can use a lumped R+L+C structure to describe pin specific or package (apply to all pins) specific parasitics. Alternatively, an IBIS model can also use a more detailed tree structure package model shown below for non-lumped structure. Regardless, it’s HFSS or Q3D’s task to convert such extracted S-parameter or multi-terminal sub-circuit into these simple lumped RLC values or tree structures to be included in an IBIS file. It’s a separated process and not discussed here as a part of the buffer modeling.
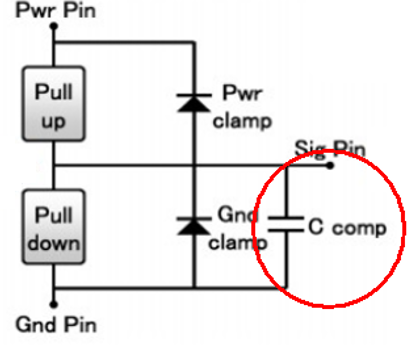
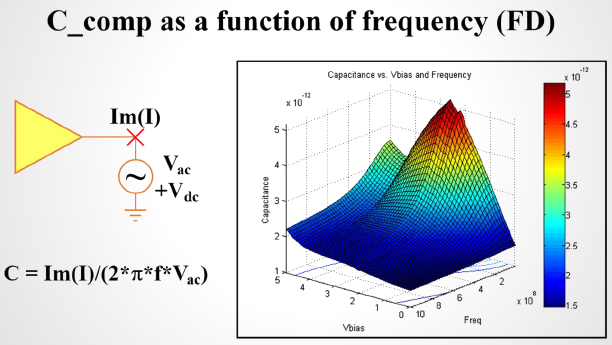
- C_Comp: At the very beginning, there is only a C_Comp value between pad and ground and it is used to describe frequency dependent behavior besides the parasitics. Later on, tool like HSpice introduces extra simulation syntax to split this single C_Comp value into branches between pad and various power terminals for better accuracy. Even later, this type of syntax was adopted as part of the IBIS spec. Still, user may only find how a single C_Comp value is computed in most materials. Briefly speaking, they can be calculated using time-domain method based on RC charging/discharging time constant or freq-domain method based on the imaginary current at a particular frequency. How to split this single value into several ones to match the frequency plot best remains an art (i.e. not standardize). In addition, the value C_Comp is not visible during modeling… their effects are only shown when there are reflections back from the other end due to impedance mismatch. What we have found is that usually an IC designer has a better idea about how this value should be and the aforementioned time/frequency domain calculation method may not produce an accurate estimate.
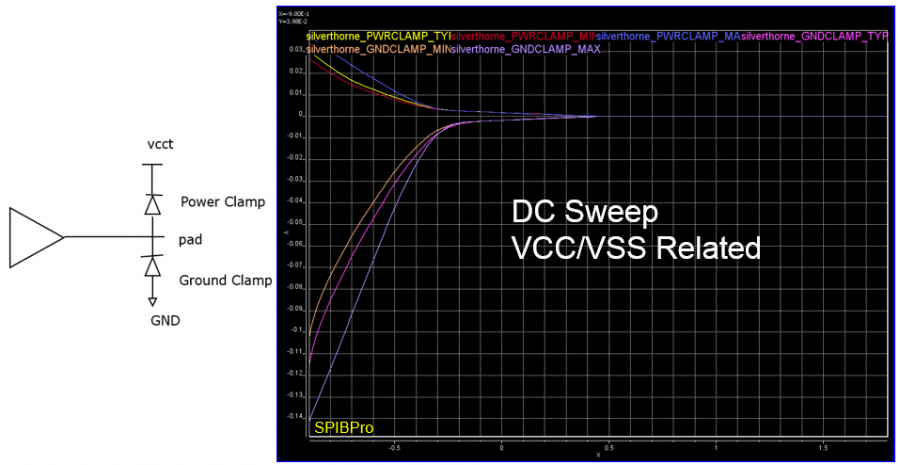
- Clamp current: Power/Ground clamp currents and Pull-up/Pull-down currents are both IV based (i.e. dc steady state). So they are combined for load-line analysis during simulation. The difference between Pull-up/Pull-down and Clamp is that the latter one (i.e. Clamp) can’t be turned-off. So its effect is always there even when we are extracting IV for Pull-up/Pull-down structures. Thus to avoid “double-counting”, the post-processing stage needs to remove the clamp current from pull-up/pull-down currents first before putting them into separated table. To simplify the situation… particular for an output differential buffer, we may just use IV data even though this is an IO buffer.
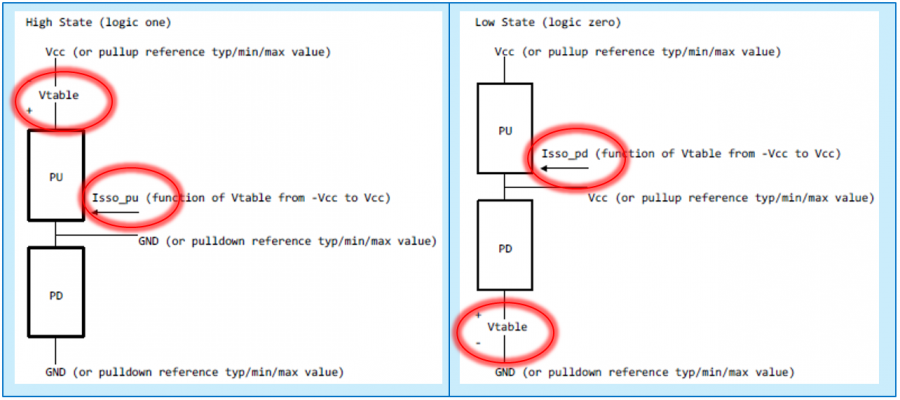
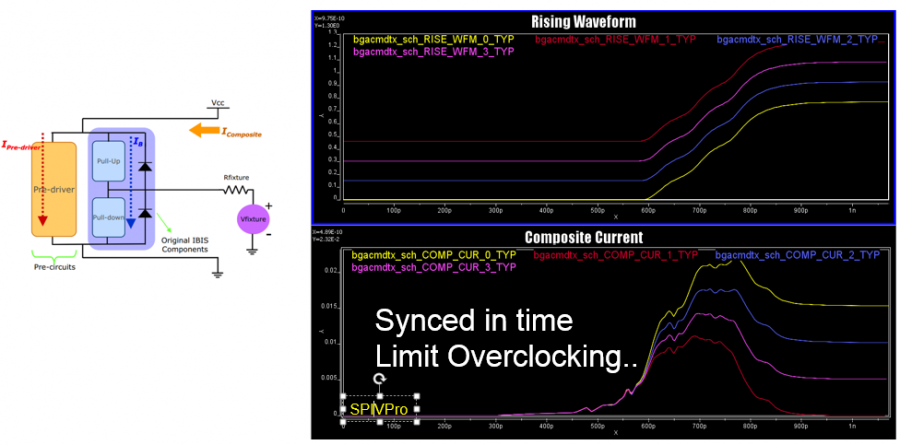
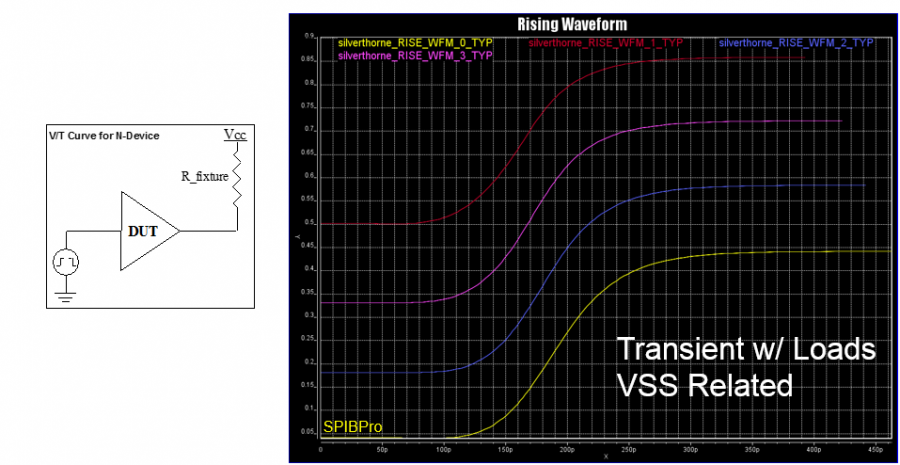
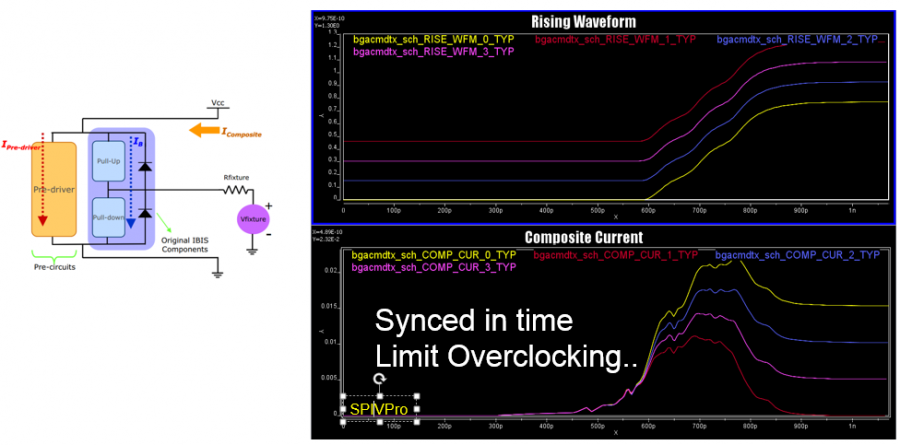
- IT current: These are different dc or transient based sweep in order to obtain buffer’s drawing current when power or ground are not “ideal”. This is important in DDR case when the DQ is single ended and it’s subjective to PDN’s noise. For differential application like SERDES, PDN’s effects are usually present at both the P and N terminals and will cancel with each other. Thus their extraction may be skipped for a differential buffer mostly. One may also note that the IT extraction of composite current is “synchronized” with VT extraction of rising/falling waveform so these current data are extracted with additional “probes” rather than separated simulation.
Full IBIS modeling flow:
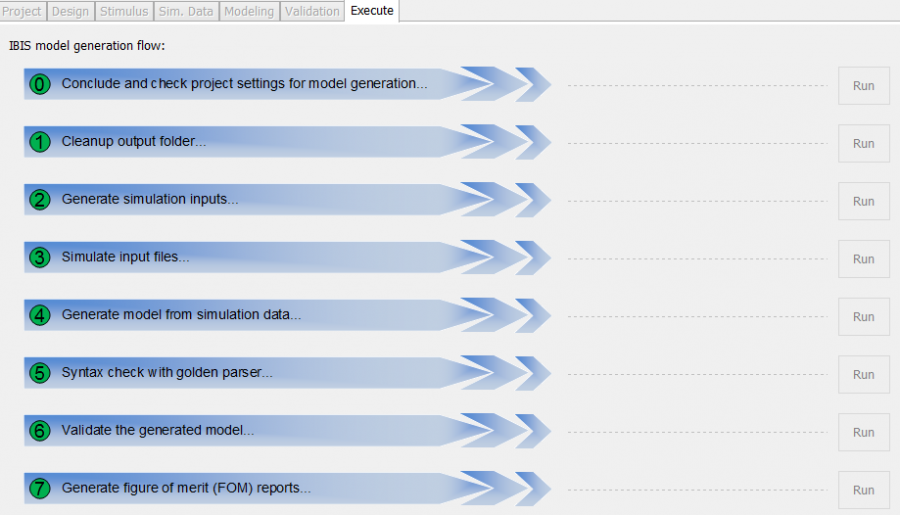
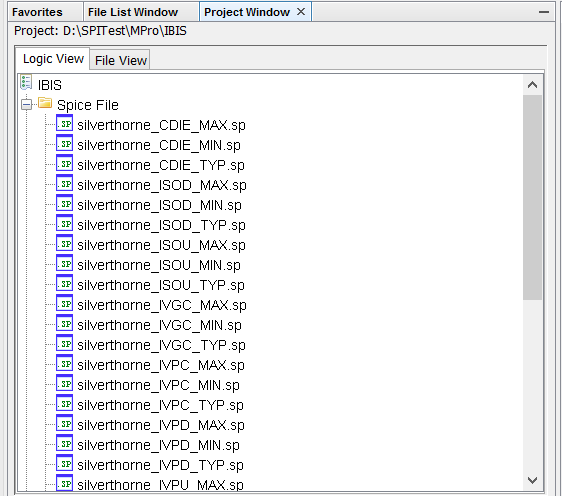
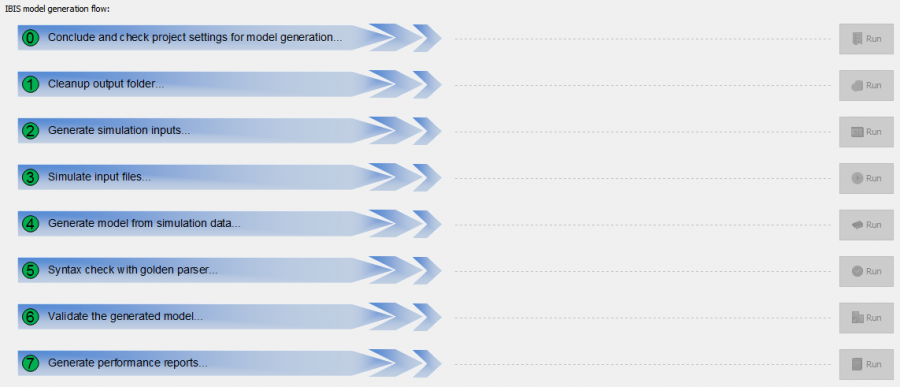
The process suggested in IBIS’s cookbook can be summarized as the following steps. They are also implemented in our “Full IBIS modeling flow” within SPIBPro:
- 0, Collect design data and collateral: A modeler needs to gather PVT (process, voltage, temperature) data, silicon design, buffer terminals’ definitions and bias conditions etc. A buffer may have several tuning “legs” and bit-set settings so a modeler needs to determine which will be used for TYP, MIN and MAX corners.
- 1, Prepare working space: Create a working space on the disk.
- 2, Generate simulation inputs: Generate simulation “decks” to excite different block of the buffer…one at a time. So one will have eighteen or more decks at the end of this stage waiting to be simulated.
- 3, Perform simulations: Perform simulation either sequentially on a local machine or with a simulation “farm”. Double check the results and make sure they make sense, otherwise, go back to step 0 to see which settings may be incorrect or missing.
- 4, Generate IBIS model: Post-process the simulation data and generate IBIS model. This is usually done by the tool like ours as manual process is tedious and error prone.
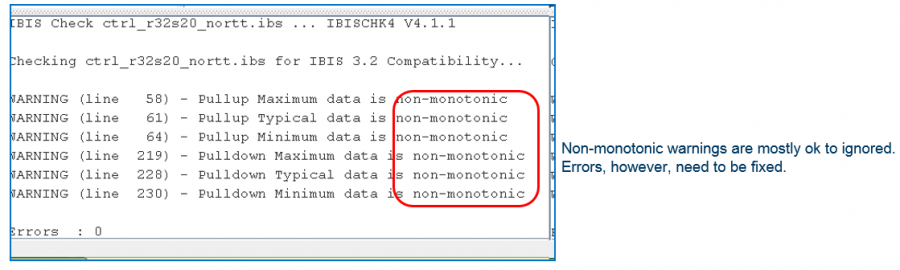
- 5, Syntax check: First quality check of an IBIS model is that it must pass the golden checker. The check here is mostly syntax-wise though there are also basic behavior check such as monotonicity or DC mismatch etc.
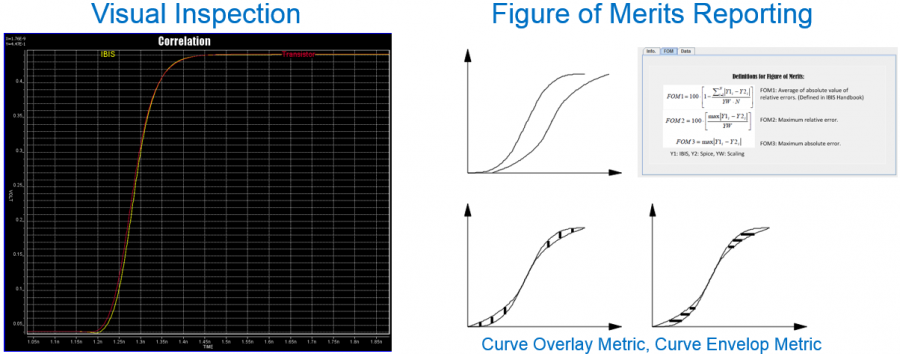
- 6, Validate IBIS model: A formal validation for an IBIS model is to hook-up test load and make sure they produce correlated results comparing to those from silicon at the end of step 3 above.
- 7, Performance report: The modeler needs to extract the performance such as PU/PD impedance values and slew rate etc. for documentation purpose and check against the spec. or data sheet.
Full step-by-step modeling flow in SPIBPro
Data extraction for a single-ended buffer:
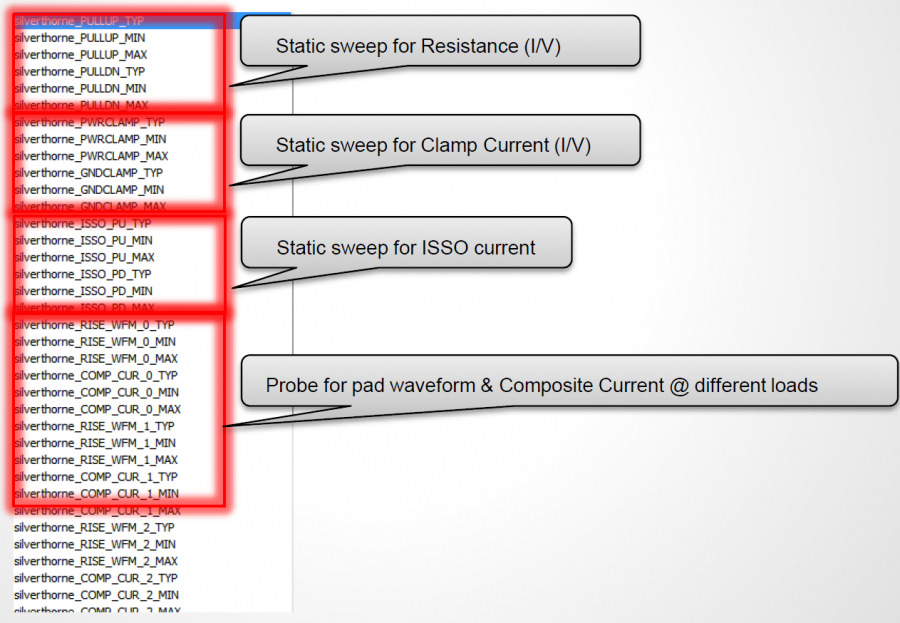
For a single-ended buffer, the first hurdle in the modeling process is to make sure each blocks are excited properly and simulation results make sense. As mentioned, there are at least eighteen simulation needs to be done:
There are also some complications regarding the DC simulation part: some of the buffer may have “clocking” and it’s not easy to separate them from the buffer iteself. Also, there may be many RC parasitics between nodes for a buffer netlist extracted from post-layout. In other cases one can’t even separate the actual IO part from the pre-driving portions and the resulting circuits to be simulated become huge and time consuming. These situations will make IV data extraction slow and often problematic. As a result, a simple step 0~7 modeling process may not work properly and one need to iterate to tune the set-up such that simulation will always converge and resulting IV curve be monotonic. Nevertheless, the single buffer’s modeling is easier to manage.
Data extraction for a differential buffer:
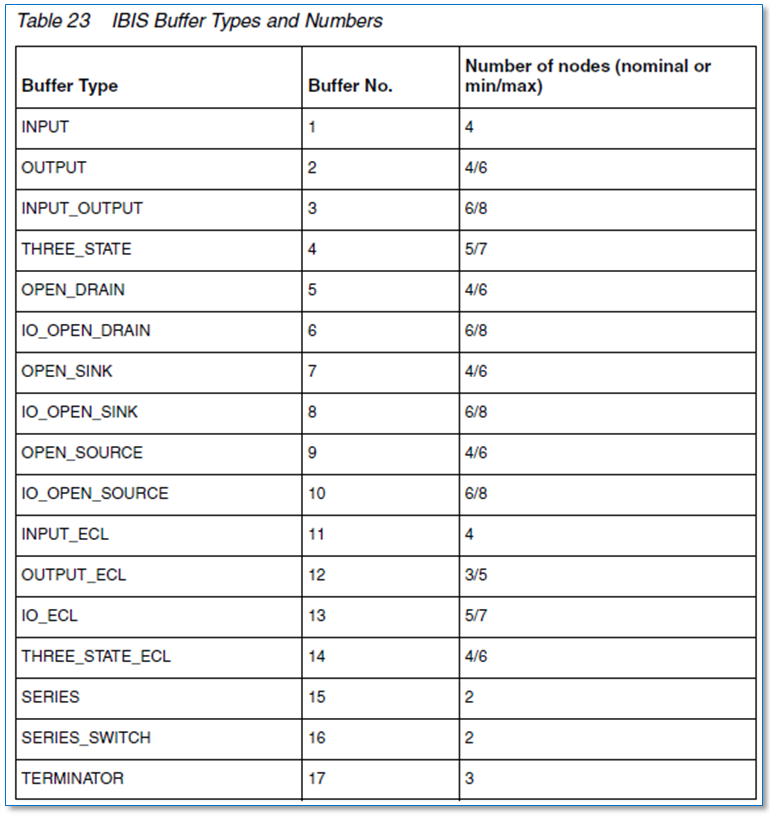
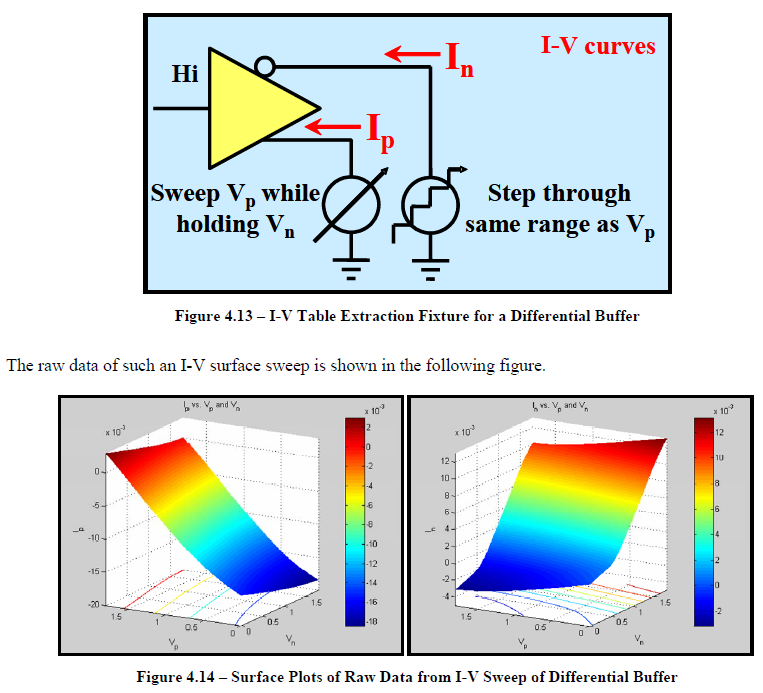
Differential buffer’s IBIS modeling extends the challenge and effort to another dimension…literally! First of all, each pin in an IBIS file or component connect to an IBIS model and the possible structures and connections between different pins are very limited. So for a differential buffer, a series element needs to be created to describe the coupling relations between pins. All the pictures used in this paragraph are from IBIS cookbook and user may find further descriptions there.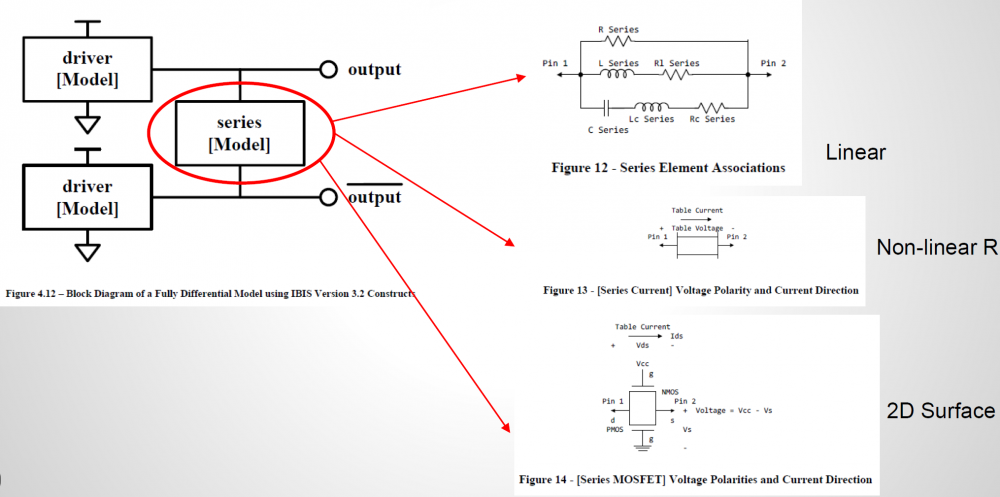
In order to construct such series model, the IV sweep needs to be performed in two dimensions, both at similar resolutions. So if say a typical single-ended IV curve has one hundred points, then the second dimension should also have that much data. That means for one particular corner, there will be one hundred IV simulation in order to construct the 2D response surface shown below. First stage post-processing also needs to be preformed so that common-mode current can be eliminated. All these need to be done before formulating a 2D data view. Only after one can visualize the resulting data, he or she can determine what components are needed to create such series model. This presents the first challenges on top of the IV simulation issues mentioned for single-ended buffer.
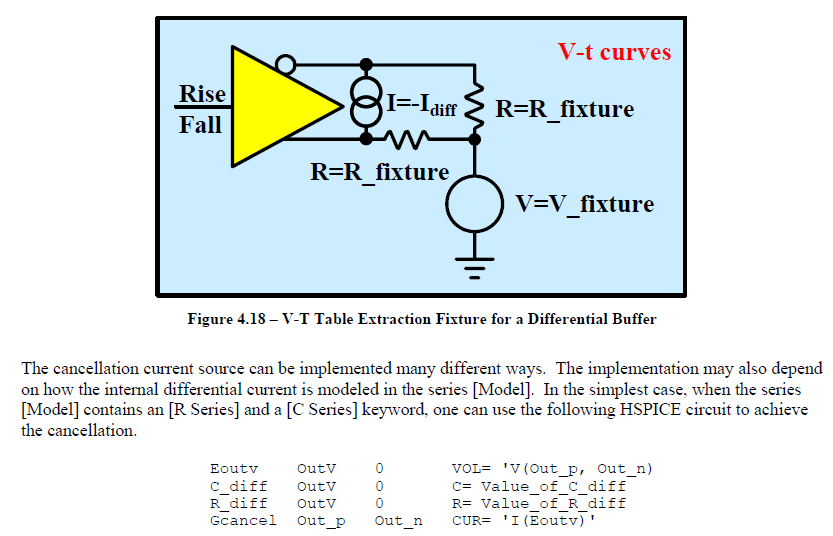
The second challenge is regarding the VT simulation. The current flow through this newly constructed series element needs to be “eliminated” to avoid being double counted. For spice-like simulator, there is no such thing as “negative resistance”, “negative capacitance” etc. So one has to resort to approaches like control elements or even Verilog-A (as we presented in IBIS Summit 2016) to have proper VT data extracted. For control-source based approach, it is only limited describe pin couplings of a simple R/C but not non-linear resistance or surface such as series mosfet. For that, an intermediate step to map device or equation parameters to the calculated 2d surface is needed. Even using Verilog-A’s look-up table, the grid resolution is limited by the step size used in first two-dimensional IV step and may have non-convergence issue if it’s to coarse. That’s why in the cook book (the first two lines in the picture below), it doesn’t suggest any approach as it’s really not that easy!
Due to these two great challenges, we have found that differential modeling may not be easy for most modeler. We feel more this way when providing modeling service to clients who wants to perform simulations themselves then send us data. They may want to do so due to IP concern or they knowing more about the design. In those cases, the back-and-forth tuning and tweaking process become a burden on their side and also delay the whole schedule. Thus we are motivated to find an alternative “quick-and-easy” approach to substitute the “formal” modeling steps mentioned above. While being able to simulate accurately w/ great performance is still number one priority, we are ok that they can only be used under some context (such as channel simulation).
Quick and easy approach:
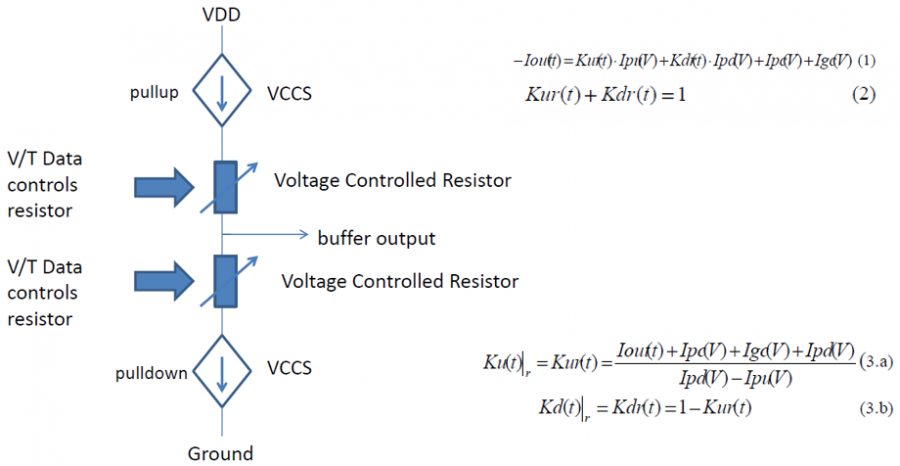
In previous post, we explained how IBIS model’s data are used in a circuit simulation. Simply speaking, the “VT” data is considered as “target” while “IV” tables are used to compute so called “switching coefficients” so that appropriate amount of current will be injected or withdrawn from the buffer pad to achieve. When this is true, the nodal voltage specified by that VT table at that particular time point will be satisfied due to KCL/KVL. Now there are switching coefficients for both pull-up and pull-down structures… thus it takes two equations to solve these two unknowns. That’s why two set of VT, each under different test loads, are required. Based on this algorithm, an IV data and calculated coefficients are actually “coupled” and affect each other. If current in IV table is larger, than the calculated coefficients will become smaller and vice versa. This way the overall injected/withdrawn current will still meet KCL/KVL required for VT. In this sense, the actual IV data is not that important as it will always be “adjusted” or “weighted” by the parameters.
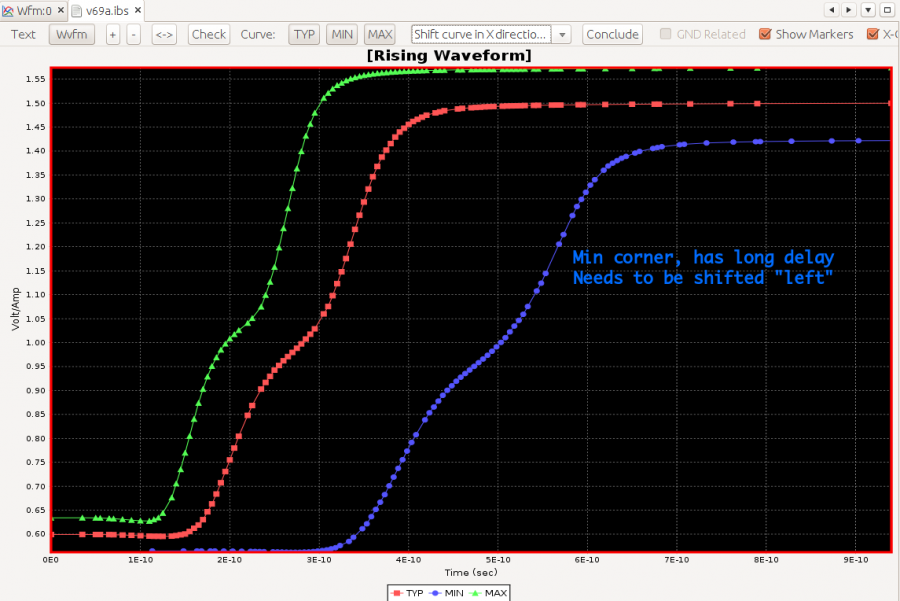
On the other hand, the VT data also contains several DC points and they need to be correlate to the IV table, otherwise DC mismatch errors will be thrown by the golden checker. In addition, the IV data is limited to 100 points and they need to be monotonic to avoid convergence issue. So if we have several sets of VT data and one under normal test load (say 100 ohms for a differential buffer), then they will give us “hints” regarding how IV data will look like.
With this assumption, we propose the following quick-N-easy modeling steps:
- Connect the silicon buffer to nominal loading conditions and obtain VT simulation data
- For Single-ended, these are simple VT waveform under two different test loads;
- For Differential, say use nominal 100 ohms first and see voltage range between V1 and V2
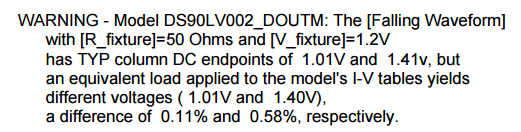
- Let V3 = (V1 + V2) / 2, use VFixture = V3 and RFixture = say 40 & 60 respectively to obtain two waveforms;
- Alternatively, use RFixture = 50 and VFixture = say (V1 + V3) / 2, (V2 + V3) / 2 respectively to obtain two waveforms;
- The main goals is to have two set or set-up covering operating range when a nominal test load (say 100 ohms) is used.
- Obtain C_Comp values from buffer IC designer
- Obtain voltage range, temperature etc parameters.
And that’s all, through carefully implemented algorithm and computation, we can generate an IBIS model based on these data with minimal simulation requirements. An the generated model is guaranteed to be error/warning free.
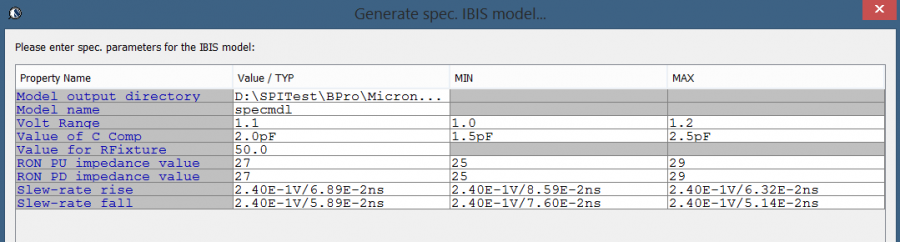
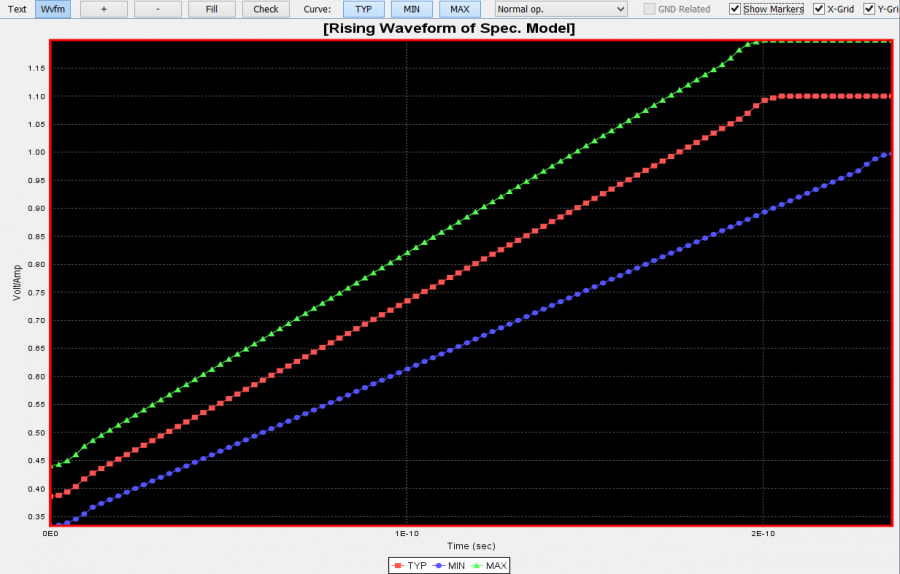
While we will not disclose how these are actually done in details, we can show how they are incorporated in our SPIBPro… as shown below. As a matter of fact, this process has been used in the modeling projects of past year and shown great success.
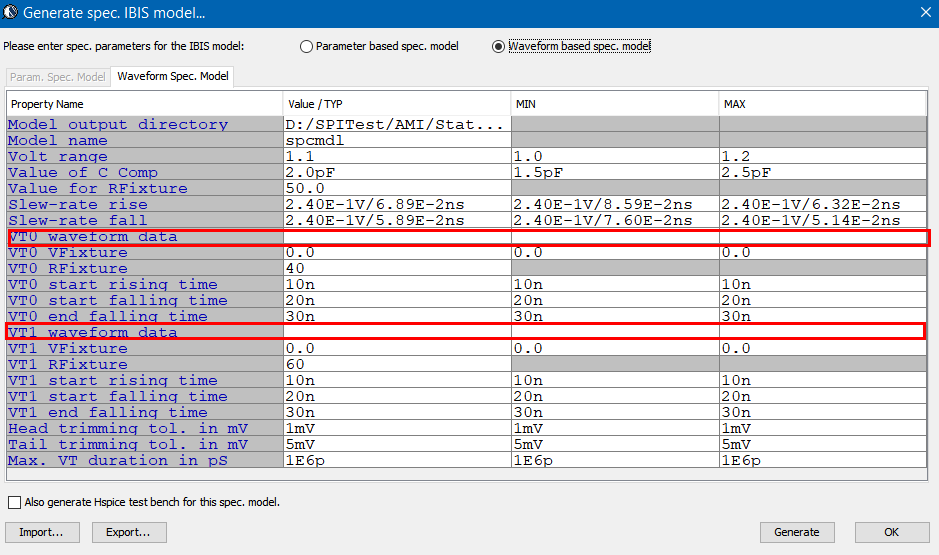
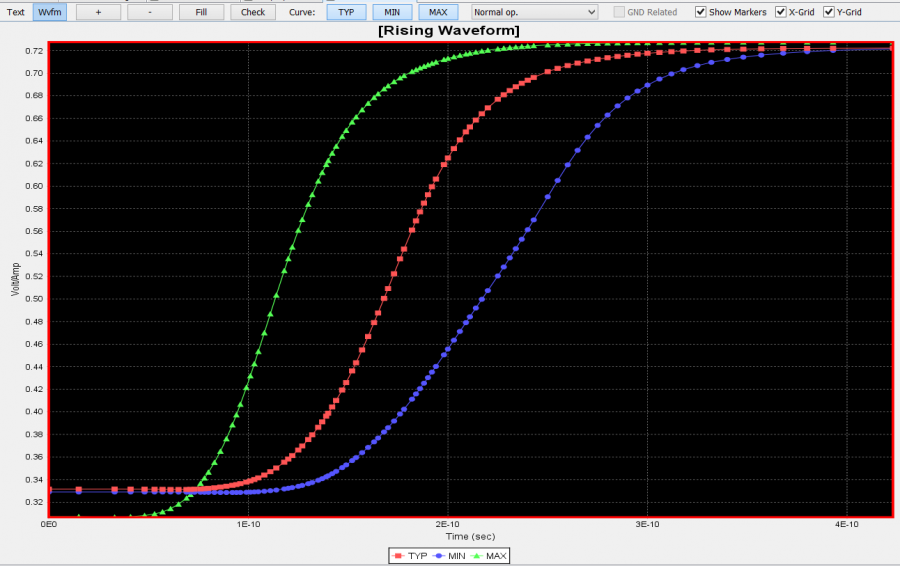
Only two VT simulation data are required to create an IBIS model
Pros and cons:
We use this approach to create differential IBIS for channel analysis purpose (together with AMI) and have not yet found any problems. Having that said, I would offer several pros and cons for reader’s considerations:
Pros:
- Minimal simulation required and easy to perform;
- Will be mathematically correct: no DC mismatch or monotonic warnings, output will match provided VT waveform under nominal test load.
Cons:
- May not be accurate if the model is used for DC sweep as the IV data in the model are artificially generated;
- No “disable” or High-Z state as clamp currents (if there are any) has been incorporate into IV data without separation;
- No Power-aware consideration as ISSO_PU/ISSO_PD generation are not taken into account.
Summary:
In this blog post, we reviewed the formal IBIS modeling process described in the cook book, challenges modelers will face and proposed an alternative “quick-and-easy” approach to address these issues. The proposed flow uses minimum simulation data while maintaining great accuracy. There might be limitations on models generated this way such as neither disable state nor power-aware data are accounted. However, in the context of channel analysis particular when a differential model is used together with its IBIS-AMI model, we have found great success with this flow. We have also incorporated this algorithm to our SPIBPro so our tool users can benefit from this efficient yet effective flow.